Copyright Michael Snively 2010


6.270
6.270 is an autonomous LEGO robot competition held yearly at MIT during the month of January. In 2008 I worked in a team of three, “Team Awesome” to design, build, and code a robot with one two things in mind: robustness and simplicity.
The game rules were relatively complicated. Each round was a head to head competition between two robots. Each robot would begin with a number of balls stored in it. Along each side of the playing field were scoring areas, each with a designated point value between 1 and 4. At the beginning of a round, the robot was given a number between 15 and 22. It was then up to the robot to drive to the different scoring areas and deposit the correct number of balls in each, scoring as closely as it could to the target number. The robot with the closest score wins.
After doing the math we discovered that by simply dropping all of the balls into our 2 point scoring area and then backing up to block our opponent’s 4 point scoring area, we were guaranteed to win every time. This reduced the autonomy problem to simply orienting the robot, driving forward, dumping balls, and driving backward. This wasn’t trivial, our gyroscope drifted, our encoders went haywire, and our gear train would bind almost religiously. This short video will give you an idea of how the design and build process progressed for the robot.
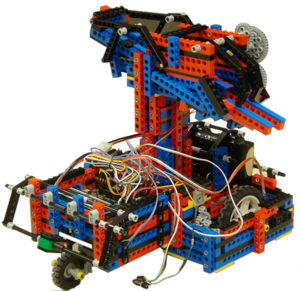
Mechanically, the robot is extremely robust. We’re quite confident that if dropped from head height, it would survive.
The final competition was very exciting and quite rewarding. Round Four against team Soup Dragon was arguably one of the most exciting matches of the entire competition. After a tie during a doubly successful run (the first of the evening), the audience demanded a rematch. In the end, our robot was successful!
The robot performed admirably during the final competition. In a field of 30 teams, it placed 3rd overall. The first round placed robots into either the winners or losers bracket. Our robot was placed into the losers bracket after malfunctioning the first round, but after a quick fix ended up facing and defeating more teams than any other robot.
More information is available on the project site here.