Copyright Michael Snively 2010


MASLAB

MASLAB, or “Mobile Autonomous Systems Laboratory” is an annual robotics competition held at MIT every January. Teams of 3-4 build a robot capable of autonomously collecting, sorting, and scoring red and yellow balls into their respective goals.
My team, “Team MESS,” prioritized quality, efficiency, repeatability, and modularity when designing our robot, which we affectionately named Biscotti Reflections. Designed entirely in SolidWorks before construction, the physical build took one weekend and required no physical changes for the rest of the competition.

The robot has three omniwheels spaced apart by 120 degrees. The omniwheels allow it to translate at arbitrary angles. Two chambers beneath the webcam are used to store the balls, one chamber for red balls and one for yellow balls. Each chamber holds up to 3 balls. The balls roll freely on the ground while they are in the chamber and while the robot is in motion. A "skirt" surrounds the chamber (see flashing gif).
The skirt is designed to mimic a rotating lemonade pitcher lid. A tube with a mousehole cutout, it rotates with the help of a servo motor to open either the red or yellow chamber, one at a time. When the robot moves about the course, the hole is centered so that no balls can escape. The ball collection itself is completely passive. To capture balls, the robot rotates until the desired chamber is facing the ball, opens the chamber, drives towards the ball until it captures it, and then closes the chamber once it has driven past the ball. To score, the robot lines up the chamber with the goal, opens the skirt, drives towards the goal to deposit the balls, backs up, closes the skirt, and finally drives forward once more to knock in any balls that didn't quite make it the first time (double-tap).
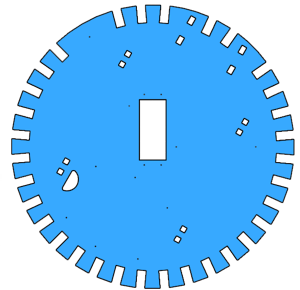
The skirt is attached to a spinning layer which is sandwiched between the bottom and top layers of acrylic. In order for that layer to be able to spin while sandwiched, it has arcs cut into it for standoffs to pierce.

The arcs span 120 degrees each, enough for the the layer to spin the opening of the skirt to each of the storage chambers.
The robot uses a laser mouse and gyroscope for odometry, giving it the ability to sense angle of rotation and distance travelled, enough information for its capture and scoring routines.
The top level of the robot is used to store the webcam, motor and sensor interfacing circuitry, and infrared distance sensors. Notches around the perimeter are designed for modular placement of IR sensors. Not knowing the ideal placement of the sensors during the build, we wanted to give the programmers options.
In the end, the robot navigated the field using an explore routine, captured red and yellow balls as it saw them, and deposited them in goals. The following video shows a full 5 minute run one week before the final competition.
The robot captured 5 balls and entered its scoring routine during final competition, when its computer began intermittently turning on and off its USB ports, disabling both our mouse and webcam. The robot halted midway through its scoring routine, turned, ran into a wall, and due to a disabled mouse, had no idea it was stalled.
While the final competition was upsetting, especially because it was a failure within the computer and not with the robot, the robot placed third overall and received the award for best mechanics and software.
More information is available on the project’s site here.
