|
|
|
|
AEGEAN SEA 2001
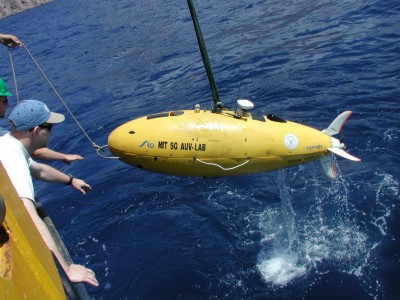
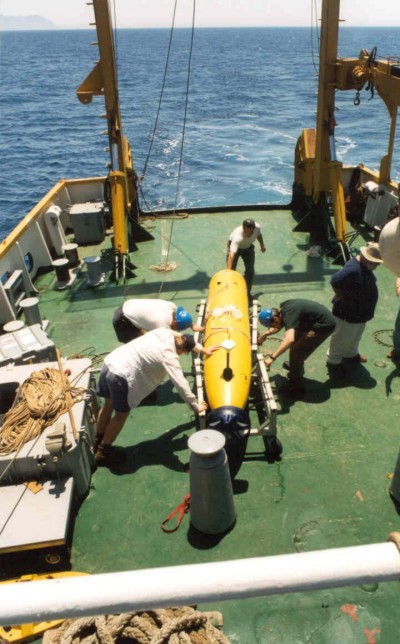
During this cruise DeepArch examined the utility of Autonomous Underwater Vehicles (AUVs) for underwater archaeology. While marine robots like the Remotely Operated Vehicle (ROV) Jason, have undertaken such research, AUVs have not. In close collaboration with archaeologists from the Greek Ministry of Culture and the Greek National Centre for Marine Research, members of the MIT Sea Grant AUV lab and DeepArch research group examined a shipwreck off the island of Nisyros in the Dodecanese. The team deployed two AUVs: an MIT Odyssey-class vehicle named Xanthos, carried a video camera for visual imaging. The other, provided by Bluefin Robotics, Inc., was equipped with a very high frequency dynamically focused multibeam side scan sonar system manufactured by Klein Associates.
We demonstrated the resolving power of the Klein sonar by lowering a stack of ten dinner plates to the seafloor. The sonar detected not only the plates but the buoy line, too.
The sonar AUV ran precise tracklines throughout the survey area, following the terrain between the 20 m and 80 m isobaths. Upon recovery of the AUV, the sonar data was downloaded to computers in Aegaeo's lab for post-processing and interpretation.
|