|
SHEAR7 Simulation
With over ten years of industry use and continuous development, SHEAR7 is one of the leading modeling tools for the prediction of vortex-induced vibration (VIV). The programs forte is the VIV response prediction of offshore structures subjected to spatially varying currents; realistic of ocean environments. The program enables users to estimate structural responses, mean drag force amplification factors and predict fatigue damage. It is simple and fast to run with all the results summarized in a convenient standard output file. The new release allows for more accurate modeling of Strakes.
The nuts and bolts...
SHEAR7 is a mode superposition program, which evaluates which modes are likely to be excited by vortex shedding and estimates the steady state, cross-flow, VIV response in uniform or sheared flows. It is capable of evaluating multi-mode, non-lock-in response, as well as single mode lock-in response.
The program evaluates natural frequencies and mode shapes of cables and beams with linearly varying or slowly varying tension and with a variety of boundary conditions, including cantilevers and free hanging risers. The program is capable of evaluating the natural frequencies and mode shapes and VIV response of horizontal catenary cables and uses an approximate structural model for inclined catenary cables.
The user may choose to compute natural frequencies and mode shapes in a separate program, such as a finite element program and provide them as input to SHEAR7 in a common.mds file. In this way, structures which are not in the standard solution set of SHEAR7 may be evaluated.
SHEAR7 can be used to predict the cross flow RMS displacement and stress; as well as fatigue damage rate and local drag amplification coefficients.
Cylinders are not required to be of constant cross-section. The user may also model sections of risers with VIV suppression devices (strakes and fairings) as well as staggered buoyancy modules.
The basic solution technique used is modal analysis and iteration (to account for the non-linear relationship between response and lift coefficient.) The physical assumption is that the power input (by lift force) and power output (through damping) for each mode should be in balance in a steady state. From initial values of lift and damping coefficients, the program finds the lift and damping coefficients in a balanced state through iteration. The converged lift and damping coefficients are used to compute cylinder response.
Throughout the years of development, SHEAR7 has remained a very simple to use program, that can quickly be run from a standard desktop computer. Once the program has run, an out file is produced which conveniently summarizes the results.
- Incorporate your own lift coefficient and damping data from experiments to predict behavour of long flexible structures.
- The ability to define the lift and damping behaviour separately for each zone on the structure.
- Results can be produced in the time domain for rainflow fatigue calculations or incorporation with other modeling programs.
Introduction of Time Sharing in Version 4.5
SHEAR7 version 4.5 was the twelfth distribution of SHEAR7. The use of the program is similar to that of versions 4.0-4.4 but the way in which the program works has been changed considerably. This reflects the findings of recent research, in particular that of the MIT/DEEPSTAR program involving towing slender pipes in the Gulf Stream offshore Miami. The most significant modification introduced in version 4.5 involves a change in the way power-in regions are apportioned in time and space.
In V4.4 and in all earlier versions of the program utilized a ‘competing modes’ model of Vortex Induced Vibrations (VIV), whereas all potentially responding modes competed among each other for power-in length on the riser. Whenever response in more than one mode was feasible, the whole power-in region was subdivided into individual power-in regions, one per mode. Any overlaps between modal power-in regions were removed. The greater the number of modes left above the cutoff power level, the smaller the individual power-in regions became. This had the effect of reducing the response of each mode. Recent research has shown that this in not seen on typical risers. Rather, each mode appears one at a time. Over a long period several modes may come and go, sharing the time that VIV is experienced. Each mode has a much larger power-in region than would be permitted by removing spatial overlap in power-in regions. Each mode has more power-in and responds with larger amplitude than would be predicted in the old method of response computation.
Time Sharing Concept
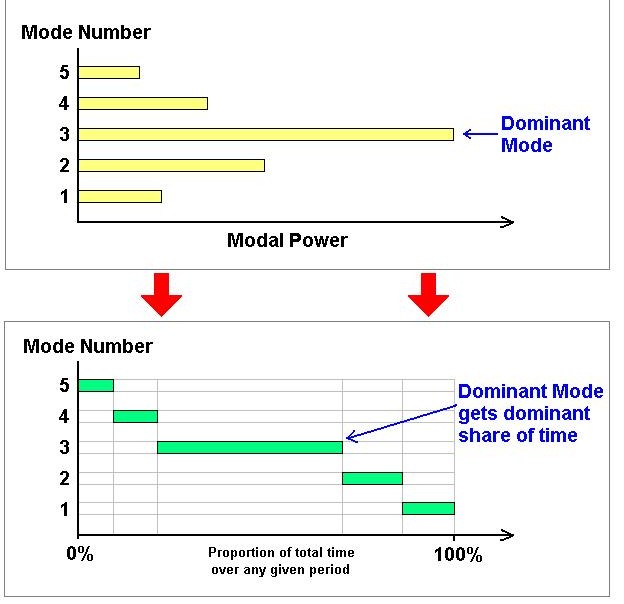
SHEAR7 versions 4.5 and 4.6 utilize the concept of time-sharing between the modes, making spatial overlap elimination between the modes unnecessary. The concept of time sharing is based on observations from the Gulf Stream, Deepstar-funded, slender pipe experiments. The data revealed that VIV response is dominated by one single frequency at a time, with the response switching frequently among frequencies.
The time sharing principle is illustrated for a low mode number example below. Similar to the way that previous program versions operated, the program first performs an initial modal power calculation using full bandwidth for the power-in region to form a basis for deciding relative modal dominance in the final modal calculation. In versions 4.5 and 4.6, after the initial power calculation, modes are allowed to respond with the full input bandwidth (power-in region) but the time over which they are allowed to respond is reduced in accordance with calculated time sharing probabilities. As the default, the time sharing probabilities are proportional to power ratios.
The program still works in the frequency domain and it still uses the Modal Superposition Method.
Current release: Version 4.6
SHEAR7 version 4.6 introduces enhancements to version 4.5, while utilizing the same time sharing concept. In particular, V4.6 allows a vastly improved modeling of strakes, both partial and close to full coverage.
The program enhancements include:
- Introduction of structural zone dependent reduced velocity bandwidth;
- Adding the option to model hydrodynamic forces on strakes in terms of sectional damping as an alternative to predominantly negative fluctuating lift coefficient (lift curve);
- Introduction of material properties varying along the model (multiple sets of moduli of elasticity and S-N Curves supported); those are defined individually in each sectional zone;
- The numbers of the S-N Curves that can now be defined or/and used in a single *.dat file are unlimited.
- The maximum allowable number of S-N curve segments is increased to 10 (from 5 that was supported in older versions); 1 to 10 segments can be used in order to define each of the multiple S-N Curves.
Licensing
Distribution of this program is restricted.
Inquiries should be directed to:
Professor J. Kim Vandiver
MIT Room 4-110
Cambridge, MA 02139 USA
Telephone: (617) 253 4366
Fax: (617) 258-5288
Email: kimv@mit.edu
|
Licenses for commercial use may be obtained through AMOG Consulting:
AMOG Consulting Inc.
770 South Post Lane, Suite 505
Houston, TX 77056
Phone : (713) 255 0020
Email: shear7@amogconsulting.com
accessibility
|

