|
The LMRs' Role LMR Design Systems Outline |
LMR Design Tree 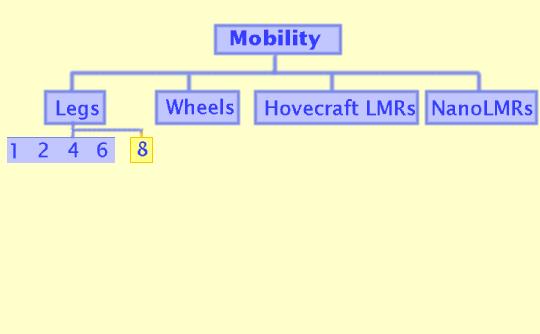
Legged Rover Systems At first glance, the concept of a legged rover system does not stand out as a particularly effective way of allowing LMRs to roam the Martian surface. Over the past 20 years, however, research has been done at MIT's Leg Lab that has made the prospect of using legged rovers in space a very real possibility.For more on the leg lab visit: http://www.ai.mit.edu/projects/leglab/ In the early 1990's MIT's MOBOT lab, (short for Mobile Robots Lab), designed two prototype legged robots, Hannibal and Atilla. These were exceedingly complex and intricate rovers capable of traversing terrain on their computer-controlled six legs. These rovers illustrated the very real possibility of designing and building a working, mobile, legged robot. For more on Hannibal and Atilla visit: http://www.ai.mit.edu/projects/hannibal/ 1 Legged LMR One legged robots, like the Monopod designed at the MIT leg lab between 1988 and 1989, have actually been built and tested. These robots are not statically stable and would fall over as soon as they stop hopping or moving. This would not be suitable for our small LMRs. To obtain clear visual imagery of the Martian surface, our small LMRs would have to be stationary. They would have to pause their operations at night-time, when the solar panel shuts down. A mono-legged LMR would not be capable of continously hopping to stay balanced.2 Legged LMR Many bipedal robots have been designed. For a selection of some of these intriguing machines visit the MIT Leg Lab Website. It is conceivable that these robots could be designed to be stable without the neeed to stay in motion. The martian surface, however, will not be particularly flat making bipedal balance a fairly tricky issue. Also, the Martian winds and weather would make it difficut for a bidepal robot to stay standing. Should one of the legs break, the robot would become an imbalanced mono-legged rover. Such a robot would be incapable of balancing whether in motion or in stand-by mode.4 Legged LMR 4 Legged LMR Quad-legged robots like the Leg Lab's quadruped, have more realistic leg configurations. It is fairly easy to balance a four legged robot, even on a fairly irregular surface. The rover would be capable of motion across the mMartian landscape and would have the ability to stop and remain standing. A four legged LMR, however, would not be very rugged. Should one leg break, the robot would find itself imbalanced and fairly incapable of moving. Indeed, a three legged rover would need to be programmed in an entirely different way than a four legged rover, making it necessary to include a separate control program in a case a leg were to break off.6 Legged LMR 6 legged LMRs like the MOBOT Lab's Hannibal and Atilla are more realistic models of legged motion. The success of the Hannibal and Atilla prototypes clearly show that a 6 legged LMR would be capable of fucntioning on the Martian surface. It would be capable of balancing well, even with strong winds and the Martian dust storms. The LMR would also be capable of sustaining itself even if one or (under certain circumstances) two legs were broken. There would be no need to completely reprogram the LMR as the models of motion for a six legged LMR and a five legged LMR are very similar.8 Legged LMR 8 legged LMrs would allow for the greatest useable level of redundnacy on the LMRs. It is conceivable that the LMR could ocontinue functioning if up to four legs are broken. This should give the smal LMRs the capability to stay out in the field for longer periods of time. A more important use of the extra two legs of an 8 legged-LMR exists however. It would be possible to use any pair of legs as a proximity detector (Angle and Brooks, 1990 "Small Planetary Rovers" ONLINE). If the leg were to brush against anything, the LMR woulld be capable of noting that it is close to an external object. In this way, the safety of the LMR in-motion can be gauranteed with more certainty. It could also be possible to carry sensors of some sort on the non-critical front two legs. Indeed a whole variety of options are opened up in having an 8 legged LMR.We have chosen that our small LMRs use the 8 legged system over a 6 legged system for the above reason. There are many reasons for choosing a legged system over a wheelled system. The surface of the terrain will appear rougher at smaller scale. Using wheels for small LMRs will therefore be less efficient than legs. Also, legged robots have the ability to step over obstacles and holes. There are methods to maintain their stability while climbing a slope by keeping the legs vertical so that the centre of mass allways lies within the polygon of support. This method is only l imited by lack of friction in the slope (very unlikely on mars) and winds, but methods can be devxeloped to overcome these factors. Wheeled LMRs Though there are many excellent wheel systems available for our small LMRs (most notably the Rocker-Bogie system used on Sojourner), the advantages of a legged system outwheigh those of a wheeled system. While the Rocker-Bogie system can overcome large obstacles it is not as rugged and sustainable as the wheeled system. Should one wheel break off, the LMR could find itself in serious trouble.Also, legged motion is more natural and lends itself towards easier obstacle advoidance and motion across particularly rugged terrain. This is particularly true consiering the possibility of using a pair of legs as proximity detectors. This cannot be done using a wheel system. One particularly advantage of the wheeled system, however, is the LMR's ability to standby in an upright position without exerting power to maintain some kind of support mechanism. Legged LMRs would need to consume some power to maintain their standing position, this can be reduced, however, with the use of supporting springs (Angle and Brooks, 1990 "Small Planetary Rovers" ONLINE). Hovercraft LMRs A hovercraft LMR was an early conecept we had for an LMR design. The possibility of designing a hovercraft LMR had the advantage of a smoother form of motion that would be capable of handling small obstacles. The problems of maintaining and inflated bubble and using a fan as the primary accelerating engine in the low-density martian atmosphere limit the hovercraft model of motion. Also, many practical issues, such as, ruggedness, and ensuring that the inflated bubble is not torn by the surrounding obstacles on the Martian surface, presented many problems.Nanorover LMRs This wheeled system of mobility deserves a separate entry on the mobility subtree. Nanorovers are very light-weight, very small, rovers, capable of not only traversing terrain, but also of communicaing, and taking video images of their surroundings. These nanorovers are being designed for asteroid reconnaissance missions at NASA's Jet Propulsion Laboatory and must take the low gravity and temperature exteremes of the asteroids into account. The nanorovers are capable of travelling in almost any position. They can be flip upside down and contain operating, and can maneuver their wheels to cross over obstacles. It is not likely that our small LMRs would benefit from being as small as these nano-rovers, however, the minituarization research being done for this project could be of great help to our small LMRs.Source: Nanorover Technologies |