The Mission
 The mission: Build a vehicle to navigate
through a series of underwater gates, enter a "target zone," find the lowest
point, deposit a depth marker, and surface. The vehicle must complete its
mission autonomously, without assistance from any off-board computer, person, or
sonar beacon. The vehicle must be able to perform in a real-world environment,
and must acomplish the task within 20 minutes.
The mission: Build a vehicle to navigate
through a series of underwater gates, enter a "target zone," find the lowest
point, deposit a depth marker, and surface. The vehicle must complete its
mission autonomously, without assistance from any off-board computer, person, or
sonar beacon. The vehicle must be able to perform in a real-world environment,
and must acomplish the task within 20 minutes.
Competition Day
Competition day was overcast. The water was murky, the
bottom of the pond was bumpy, and there were cables running at various depths
throughout the arena. The U.S. Navy Experimental Diving Unit was on hand to
retrive errant vehicles, and they advised that we not go swimming, as the pond
was filled with leeches.
We had moderate sucess in the test runs, but had not been able to navigate a
particular part of the course. So we went into the competition 6.270 style, with
a totally untested piece of high-level control code, written in the hotel the
night before the contest. The new code was a nonlinear correction to our
navigation algorithim, intended to carry the vehicle along corners on a depth
contour.

Leila, Francisco,
Seth, and Sawyer do pre-flight checks while Frank, Ara, and Matt fire up the
computers. Rear Admiral Paul Gaffney, Chief of Naval Research, the Navy
Experimental Diving Unit, and scientists from the Office of Naval Research and
the Naval Sea Systems Command observe.
We made our way up to the dock through a crowd of observers. The competition
organizers started the 10 minute setup clock, and we fired up the laptops and
brought out the high-gain antenna.
We started to ping the computer in the submarine, waiting for it to boot. We
could hear the hard disk spinning, but the computer wasn't responding. The crowd
looked on anxiously. Failure at this point would have been very embarrassing.
Several nervous minutes passed. Then, just as Matt started to tell the
mechanical team to pull out the wrenches and open up the hull, we started
getting echo replies.

Leila, Emily,
Jon, Seth, and Eric verify that everything is go for launch before pressurizing
the hull.
We pulled the ethernet and fired up the radio link, relieved to see the login
prompt. Edward logged in and called out some final pre-flight telemetry
numbers---"cabin pressure 19.6 PSI and holding, battery voltage 13.1 volts," and
then the software team gave the go ahead to lower the submarine into the water,
untethered. Radio dosen't work under water---even with our high-power
transmitter, when the submarine dove below a depth of five feet, we were out of
radio contact. If it were to fail at depth, the divers would have to go after
it.

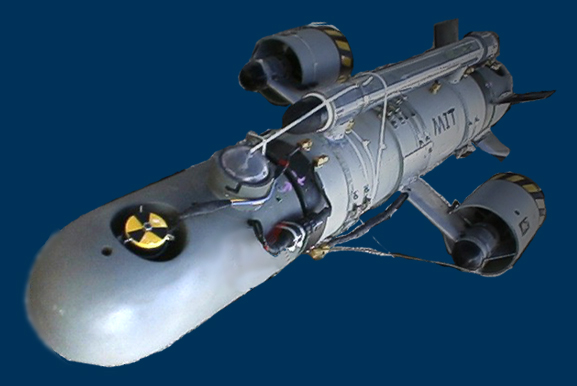
The ORCA-1 in the
P-253 test pond.
Edward did a few in-water tests, issued the go command, and for the first
time ever, stood up and walked to the other side of the dock to get a better
view of the submarine, which was running completely autonomously. It dove to its
operating depth, did a 360 degree turn in place to determine the local depth
gradient, took a heading, and started moving toward the first gate.
Ten feet from the first gate, just as it was about to go through, it veered
hard to the right and went precisely around the right gate pole, as if it were
trying to avoid scoring points. It continued, perfectly on course, and again,
ten feet from the second gate, it veered hard to the right and went precisely
around the right gate pole again. What was going on was precisely correct on
almost every level, but it was dead wrong where it counted.
Ara keyed his radio. "Abort. Abort," he said, "Get this thing out of the
water and bring it back to the dock." As the divers went into action, Edward,
Bunnie, Matt, and Ara ran back to the computers. There were ten minutes left on
the clock to demonstrate a sucessful autonomous run to the judges. Edward looked
at the submarine, looked at the course, closed his eyes for a second, and then
turned to the keyboard and started typing. He logged into the submarine, which
was sitting in the back of a rubber boat being driven across the test pond,
grepped for somthing in the code, fixed it with emacs, recompiled, and ran the
program again, with five minutes left on the clock.
The submarine dove, found a heading, and started going toward the first gate.
We all stood at the side of the pond as it cut through the water, helpless to do
anything but watch. It went straight through the first and second gates,
securing us the needed 700 points.
Seth called out "I'm a beaver," and all 15 replied:
You're a beaver
We are beavers all
And when we get together,
We do the beaver call:
e to the u, du, dx
e to the x, dx
Cosine, Secant, Tangent, Sine
3.14159
Integral, Radical, u dv
Slip Stick, Slide Rule, M.I.T.
ORCA, ORCA, A.U.V.
Go Tech!

The Team: Jon
Edelson, Matt Reynolds, Edward Boyden, Ara Knaian, Seth Newburg, Matt Hancher,
David Newburg, Bob Altshuler, Andrew Huang, Francisco Delatorre, Sawyer Fuller,
Eric Smith, Emily Warmann, Ahmed Ait-Ghezala, Leila Hasan, and Frank Lee.
Not
Pictured: Corrina Chase, Jonah Elgart, Holly Gates, Ben Polito
|

 Copyright 1998-2009 MIT.
Copyright 1998-2009 MIT.