
|
| About O.R.C.A. |
| >>Home |
| >>The Team |
| >>Articles & Press |
| >>Orca Brochure |
| >>Our Sponsors |
| >>Contact Us |
| >>Join ORCA<<<<<<<< |
| Competitions |
| >>2009 Summer |
| >>2006 Summer |
| >>2005 <3rd Place> |
| >>2004 <1st Place> |
| >>2003 <4th Place> |
| >>2002 <1st Place> |
| >>2001 <1st Place> |
| >>2000 <2nd Place> |
| >>1999 <1st Place> |
| >>1998 <1st Place> |
| Technical Info |
| >>ORCA XI |
| >>ORCA VIII (NEW) |
| >>ORCA VII |
| >>ORCA IV |
| >>ORCA II & III |
| >>ORCA I |
| Photo Albums |
| >>2005 Competition |
| >>2004 Competition |
| >>2003 Competition |
| >>2002 Construction |
| >>2002 Competition |
| >>2001 Construction |
| >>2001 Competition |
| >>2000 Competition |
| >>1999 Competition |
The ORCA II VehicleOverview
Hull DesignThe ORCA II hull is designed to be a stable, flexible platform. Like its predecessor, ORCA-2 is divided fore-and-aft into three separate modules. The central section of the vehicle consists of two sealed electronics tubes stacked vertically with powerful thrusters mounted on either side. The bow and stern sections are faired, flooded modules containing vertical thrusters, environmental sensors, and mission-specific payloads.
Sensors and ElectronicsORCA-2 contains a refined suite of sensors tailored to the AUVSI mission. The vehicle contains an internal compass/inclinometer unit by Precision Navigation Inc., and a homemade inertial measurement unit with three axes of rate gyros. The vehicle senses its immediate environment through the use of a precision pressure sensor and a Tritech sonar range finder. The vehicle control system runs on a fully-featured pentium-class single-board computer running the Linux operating system. The control program can be accessed and modified remotely via a 900 MHz radio modem when the vehicle is near the surface, or via an ethernet cable tether for deeper operation at close range. Additional InformationAdditional information about ORCA II can be found in the Articles and Press section of this site. |
 The underlying goal of our design is a robust, flexible,
modular vehicle that can be easily modified. The physical infrastructure is
designed to provide our programmers a large solution space and a great deal of
strategic freedom. The vehicle uses a magnetic compass, a sonar altimeter,
and a pressure sensor to follow a depth contour through the six gates.
Improvements over last year include an inertial measurement unit with three axes
of rate gyros and a Kalman filter to combine all sensor data and make the
vehicle less susceptible to periodic measurement error.
The underlying goal of our design is a robust, flexible,
modular vehicle that can be easily modified. The physical infrastructure is
designed to provide our programmers a large solution space and a great deal of
strategic freedom. The vehicle uses a magnetic compass, a sonar altimeter,
and a pressure sensor to follow a depth contour through the six gates.
Improvements over last year include an inertial measurement unit with three axes
of rate gyros and a Kalman filter to combine all sensor data and make the
vehicle less susceptible to periodic measurement error.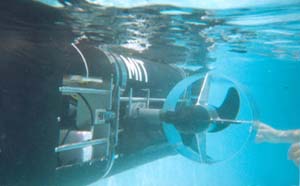 We took great pains to make the vehicle stable and easy to use. Like last year, the batteries are placed
low in the center of the hull to maximize static stability. The bow and stern sections swing away from the
central hull module, allowing easy access to the vehicle electronics. The pressure hulls could be opened
in under thirty seconds, and backplane connectors on the mounting cards eliminated the wiring harnesses
and plugs in the ORCA-1 design.
We took great pains to make the vehicle stable and easy to use. Like last year, the batteries are placed
low in the center of the hull to maximize static stability. The bow and stern sections swing away from the
central hull module, allowing easy access to the vehicle electronics. The pressure hulls could be opened
in under thirty seconds, and backplane connectors on the mounting cards eliminated the wiring harnesses
and plugs in the ORCA-1 design. Copyright 1998-2009 MIT.
Copyright 1998-2009 MIT.
Last updated on June 20, 2009.
Contact us at auv@mit.edu