
|
| About O.R.C.A. |
| >>Home |
| >>The Team |
| >>Articles & Press |
| >>Orca Brochure |
| >>Our Sponsors |
| >>Contact Us |
| >>Join ORCA<<<<<<<< |
| Competitions |
| >>2009 Summer |
| >>2006 Summer |
| >>2005 <3rd Place> |
| >>2004 <1st Place> |
| >>2003 <4th Place> |
| >>2002 <1st Place> |
| >>2001 <1st Place> |
| >>2000 <2nd Place> |
| >>1999 <1st Place> |
| >>1998 <1st Place> |
| Technical Info |
| >>ORCA XI |
| >>ORCA VIII (NEW) |
| >>ORCA VII |
| >>ORCA IV |
| >>ORCA II & III |
| >>ORCA I |
| Photo Albums |
| >>2005 Competition |
| >>2004 Competition |
| >>2003 Competition |
| >>2002 Construction |
| >>2002 Competition |
| >>2001 Construction |
| >>2001 Competition |
| >>2000 Competition |
| >>1999 Competition |
The ORCA VIII Vehicle
SensorsThe ORCA VIII is equipped with the following sensors
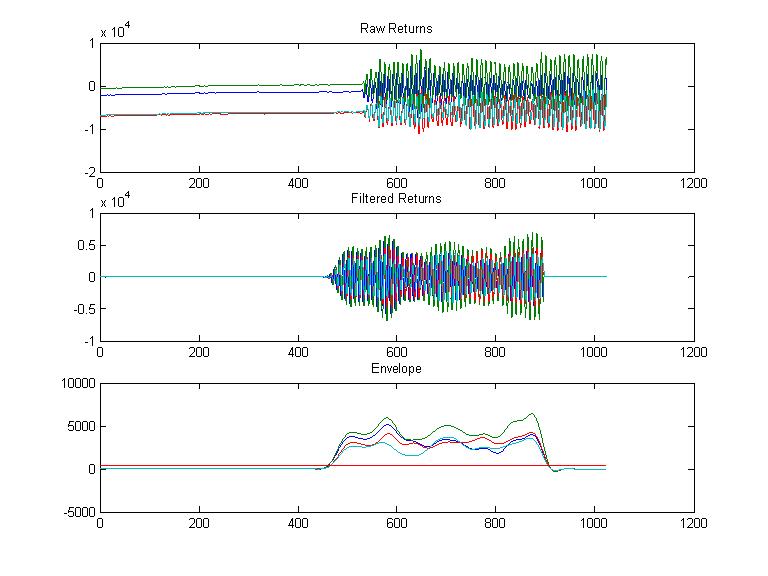
IMUThe Six Axis Inertial Measurement unit (IMU) has been developed that measureus the vehicles six axis acceleration using a set of Analog Devices MEMs accelerometers and rate gyros. The angular rate measurement is integrated to give a second measure of heading, roll and pitch. This information is combined with the compass data using an Extended Kalman Filter. Acoustic Direction FinderThe system detects pings using four hydrophones mounted in a pyramidal array. The hydrophones are mounted to the bottom of a waterproof enclosure, which contains processing electronics. The passive sonar system communicates with the ORCA-VIII main computer using an RS-232 serial port. For each ping received, the unit transmits the bearing and
Line Scan Camera
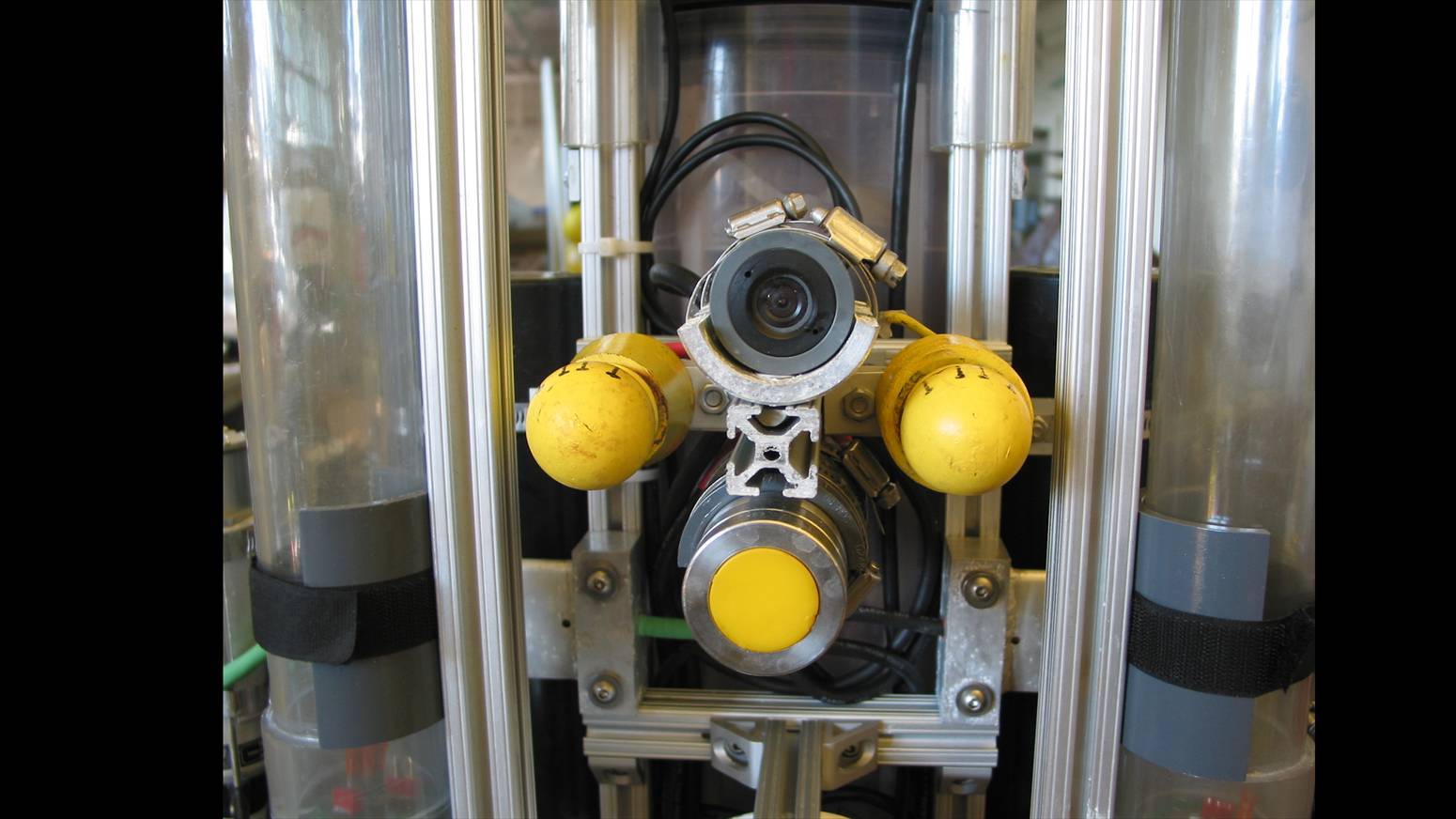
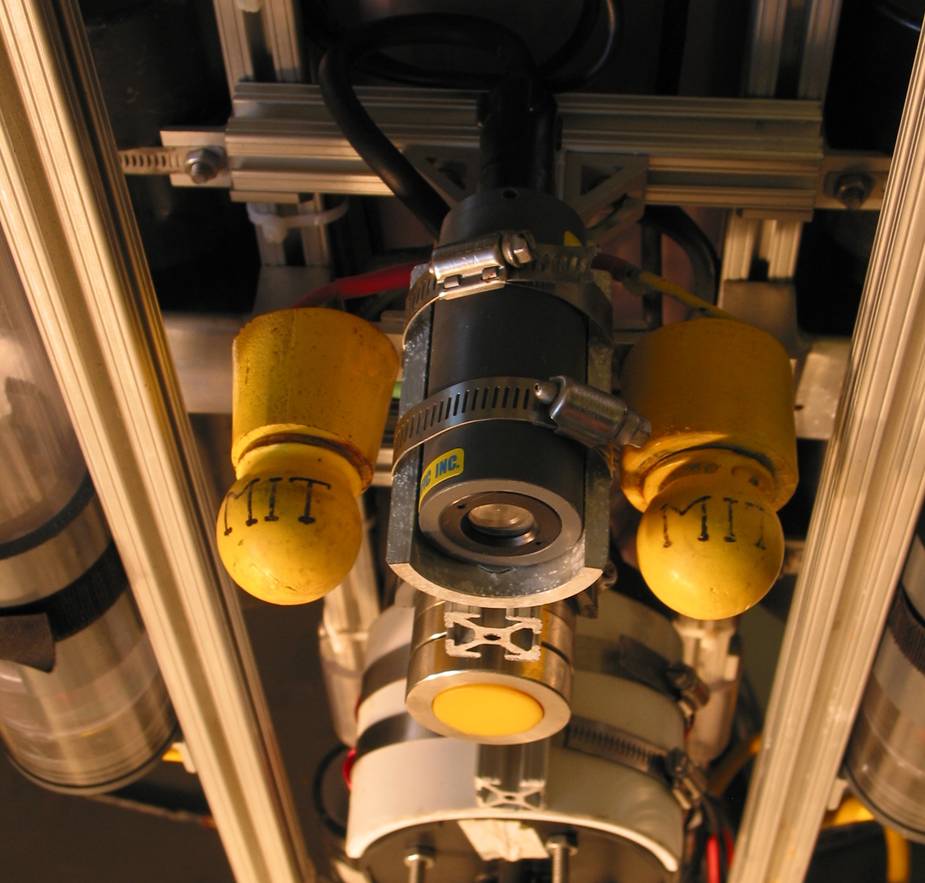
2D Vision SoftwareThis year, ORCA is outfitted with two firewire cameras, one mounted searching the pool floor and the other facing forward. ORCA also has a linescan camera which is capable of up to 10000 frames per seconds to be used to identify the 3 kHz blinking Docking Station from great distance in the pool. The forward cameras will be searching for the random order light box, docking station and pipeline. The downward facing camera will be looking for the pipeline and bin. The downward camera software for pipelines will give ORCA a heading for following the orange pipeline in view. As for the bin, we ensure the black bin is square by rotating the bin in a bounding box to ensure it is indeed square enough and tell ORCA how to move if it plans to center over this bin. The forward camera software will decode the light box letting ORCA know the color and frequency of blinking to set up the sequence of tasks to perform. For pipelines and the docking station, the software will give ORCA a heading to move toward the pipe. The vision GUI pictured here is used to configure the color ranges corresponding to each object. One can freeze a frame coming in from the sub’s live free and adjust what ORCA’s defines to be a pipeline, docking station, etc. The image is processed in real time so you can see what ORCA would be picking up as in object in the current frame as you adjust the colors. 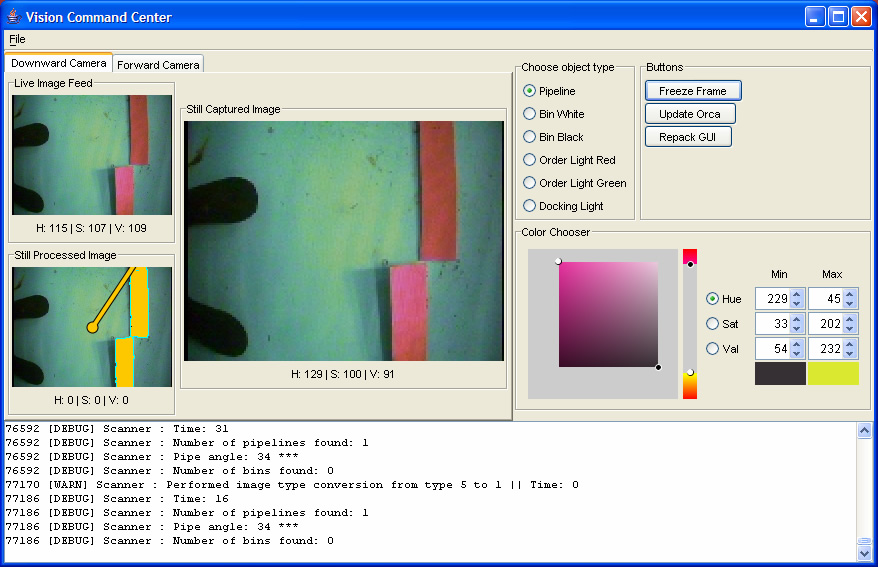
SimulatorThis year we created a java simulator which was extremely useful in developing and testing the vision software. In the simulator, the user can send commands to a virtual ORCA, run missions and test out the different parts of a mission. For example, we were able to test out pipeline following and bin centering as well as simply testing to see if the software was identifying objects and sending the right information to the ORCA controller. As you can see the top right window in the simulator is a third person view of orca and the perspective can be changed using the mouse. The bottom right window is a top down view of the virtual pool showing orca and the objects locations. On the left side, we have feeds from ORCA’s cameras. Top-left is ORCA’s downward looking camera and Bottom-right is ORCA’s forward looking camera. Hopefully we can make this tool even better next year and take advantage of it. 
Mission PackageORCA VIII contains a cluster of sensors for locating and marking the "pipeline break". This package includes: a sonar rangefinder which can detect when the vehicle has crossed the edge of the pipeline as well as passed over the bin center, a color video camera which is used for vision based pipeline following as well as bin centering, and two drop markers.
Propulsion and Power ElectronicsThe ORCA VIII is powered by four ROV thrusters. Two thrusters provide forward thrust and yaw. and two thrusters provide depthcontrol and pitch control. The motors are controlled using custom motor controllers based on the open source motor controller design (OSMC). These controllers have been customized the space and lower current requirements of our vehicle. See motor controllers for details. 
|
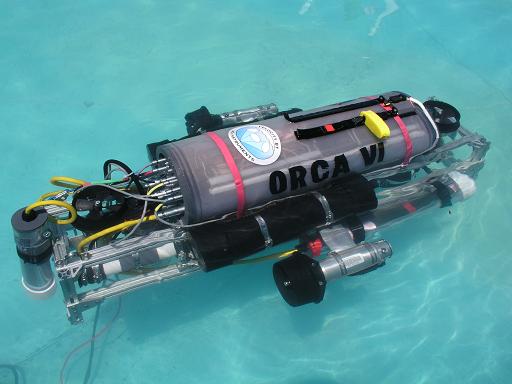 The ORCA-VIII follows the basic modular design philosophy of previous incarnations of ORCA.
The mechanical frame and core systems are mostly unchanged from the 2004 entry allowing
development efforts to be concentrated on redesigning some of the systems for increased
performance and reliability.
The ORCA-VIII follows the basic modular design philosophy of previous incarnations of ORCA.
The mechanical frame and core systems are mostly unchanged from the 2004 entry allowing
development efforts to be concentrated on redesigning some of the systems for increased
performance and reliability.

 Copyright 1998-2009 MIT.
Copyright 1998-2009 MIT.
Last updated on June 20, 2009.
Contact us at auv@mit.edu