I have had the opportunity to participate in many exciting projects during my time at MIT. Most of these were supported through the Sea Grant Program. Some of them were Undergraduate Research Opportunities Program (UROP) projects which are one of the unique features of an MIT education. Others were part of my graduate education and my thesis research. On this page I have information about some of my favorites. If you are interested in further details about any of these projects please feel free to email me.
The Projects described here include:
Ocean Engineering Outreach and Communications
The first ASC I helped develop was called ARTEMIS. We chose the name following the tradition of using Greek names for Sea Grant's vehicles. Despite this I developed a meaning for each letter so ARTEMIS could really be an acronym. It stands for Autonomous Remote Tracking and Environmental Monitoring Integrated System. While this is an ambitious title for such a small system it does explain a little bit about what we wanted the ASC to do. At first we wanted to develop a system which could track tagged fish. This was the goal of a seminar I took during the first term of my sophomore year. After that I was hired as a UROP student but got distracted by Field Operations with the AUV Lab which took up most of my second term that year. Eventually I got back to ASCs over the summer. Another student and I finally developed ARTEMIS to the point where it could use a simple navigation system to autonomously cross the Charles River and return. My report on this work was my first technical paper writing experience.
At that point ARTEMIS was mothballed for a while because it was not seaworthy enough to operate in the open ocean where we still wanted to track fish. While I focused on developing another ASC based on a Kayak, a Graduate student used ARTEMIS as a test bed for autonomous hydrographic surveys. Basically, she added a depth sounder and a GPS to the ASC and used it to map the bottom of the Charles River. In addition to these basic hydrographic surveys some experiments on control theory were also performed with ARTEMIS. A paper on this work was my first paper published in a technical journal. This preliminary work with hydrographic surveys proved to be the first step in an effort which would lead to the most sophisticated ASC I helped develop, the ASC ACES.
ARTEMIS was four feet long and weighed in at about 40 pounds. It used an electric motor and a small servo to drive and steer. At its most sophisticated ARTEMIS carried a small microcomputer, a GPS receiver, and a depth sounder. This picture shows ARTEMIS in this basic hydrographic survey configuration.

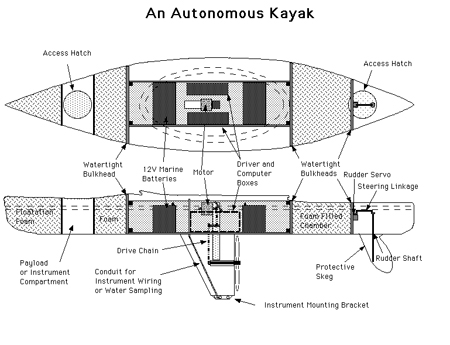
To develop an ASC which could perform in open ocean waters I began experimenting with a Kayak as a mechanical platform. As part of my Senior Design project I did some theoretical research which demonstrated how the kayak could be made stable enough to operate in rough waters. As a UROP I turned the basic kayak into a small motorized vessel suitable for conversion to an ASC. I designed and built a keel to add stability and to house a propulsion system. I also installed a servo controlled rudder and an internal structure to hold batteries and payload in place. The pictures below show a picture of the kayak when I was done with it and a schematic drawing of the layout. After I completed my senior project I handed the kayak over to other undergrads to install the required electronics and systems needed to make it a fish tracking platform. The kayak is now capable of following tagged fish as described in a recent paper. I went on to grad school and developed another ASC.
To make ASCs a more useful tool for performing hydrographic surveys I helped develop a third ASC, the Autonomous Coastal Exploration System. We took a small catamaran hull and added an outboard motor and many sophisticated electronics systems to it. Over the two years of my Master's program we developed the basic platform. I described this effort in a paper presented at Oceans '97. We then added many different electronics systems and performed hydrographic surveys in Boston Harbor. I used these results to write my Master's Thesis and presented them in a paper at the Oceans Community Conference in November, 1998.
We recently finished two stages of refitting the ASC with new power and propulsion systems. We are also installing a new computer system and writing new control software. The project team includes UROPs and Sea Grant Staff. Currently Whitney Cornforth (UROP) and Joe Curran (Research Engineer) are working on the ASC project. Aaron Marsh (Research Specialist) and Colette Wiseman (UROP) are past members of the team. A paper on this development work will be presented at Oceans 2000. The picture below was taken during July 1999 sea trials.

The major focus of current ASC research is to install a sub-bottom profiler which uses sound waves to provide "images" of what is under the sea floor. This insturment was used on two ancient Phoenician wrecks in the Mediterranean Sea during the Summer of 1999. Some impressive data was collected but now it needs a baseline for comparison. We will mount the profiler on a pole under the ASC and drive it over a shallow water wreck in Maine. This wreck was excavated by scuba diving archaeologists and then reburied. This means when we look at the data we can compare it to the excavation reports and identify how the sub-bottom profiler "sees" different parts of a buried wreck. To complete this mission we will need to use a sophisticated acoustic navigation system and develop a closed-loop control system for the ASC. We have been field testing the navigation system and the revised ASC. We hope to complete the control system development and then prepare for the shipwreck survey. This effort is part of my collaboration with the MIT Deep Sea Archeology research group.
Another project I worked on over the past several years was for a private company. Intercept Boats of Hingham Massachusetts asked us to help them demonstrate that their high speed catamaran was a better handling and smoother riding vessel than conventional fast boats. By fast I mean really fast, like 80 mph fast. Anyway, they wanted to sell this boat to U.S. Customs because the boats they were using were rough on the crew. So I assembled an electronic instrument package which measured the accelerations of the boat as it rode various waves. In several tests we collected data which indicated that this boat (the NightCat 27) was superior to its competition. After our report, the U.S. Naval Surface Warfare Center became interested and conducted further tests of their own on the NightCat 27. I was sent to St. Augustine, Florida to observe the Navy tests. This was a great trip and it was very impressive to work with some of the fastest boats and top specialists from the Navy, Customs, Border Patrol, and DEA. The picture below shows the NightCat during one of these tests.

One of my first projects at Sea Grant (back in 1994) was helping the AUV Lab test their latest vehicle under ice. In order to prepare for a deployment to the Arctic they were testing the AUV Odyssesy under ice on a frozen lake in New Hampshire. I helped build a special platform which would become a mobile lab and deployment base for the AUV. I also went and helped set up this base and generally had a blast driving snow mobiles and helping out with a real challenging test. The picture below is one of me cutting a hole through the ice (about 8 inches thick) so that we could launch the AUV. The platform to the right is what I built. With an Arctic tent attached it became a relativley cozy lab out on the ice.

These days I manage all AUV Lab operations. During August and September of 1999 we deployed our vehicles as part of an Autonomous Ocean Sampling Network. This project brought together several major research programs. Participants included: MIT AUV Lab, MIT Dept. of Ocean Engineering, Woods Hole Oceanographic Institute (WHOI), University of Washington, and Scripps Institute of Oceanography (SIO). MIT brought four AUVs, SIO/WHOI brought one gliding AUV, U. Wash brought three gliders, and WHOI provided a network of four moorings used for docking and communicating with the AUVs.
This entire effort was staged out of the Monterey Bay Aquairum Institute. They were a great help and provided valuable support and advice. We also had the benefit of a great captain on the Shana Rae, our AUV operations vessel. With the help of these great folks my first expedition as Operations Manager went well. I learned a great deal and enjoyed the chance to participate in this exctiting research.
In January a new version of the Odyssey AUV Class was tested. This new configuration, dubbed the Odyssey IIc at MIT, has replaced the aging computer, software, and Attitude Heading Reference System (AHRS) of the original design. Our new AHRS is half the size of the original with improved performance. We also replaced a late 80's vintage computer using a MC68020 processor with a new PC104 based system. This new configuration was tested in Monterey Bay. I picked up our ship, the R/V McArthur operated by NOAA in Seattle. I set up some preliminary equipment and then sailed down to San Francisco. The Pacific Northwest is not a fun place to be on a ship in January. We saw some heavy seas (approaching 30 foot waves) but made it down to San Fran to pick up the AUV. Then we sailed to Monterey for the tests.
This new version was so successful that we decided to upgrade the other two vehicles at MIT. I spent January - July 2000 overseeing this upgrade. It was quite a challenge as many of the old vehicle systems were in bad repair. But it all paid off. On August 8 we finally deployed the upgraded vehicle and completed successful sea trials in La Spezia Italy. We brought the vehicle over there to the NATO SACLANT Undersea Research Centre. We collaborate with this group on the Generic Oceangraphic Array Technologies (GOATS) joint research program. The August trials were an important first step for the field experiment following in September and October. It was very rewarding to watch the new vehicle run for the first time. Especially since its shipping container was inverted during the trip and it ended up spending over a week upside down!!! AUVs are not designed for that but it pulled through.
After a brief break back at home I spent five weeks in September and October in Italy running the MIT AUV portion of GOATS 2000. This was a big operation and included teams from Florida Atlantic University, LIRMM in France, and of course SACLANT too. We had four AUVs (two from MIT) on board the R/V Alliance. This was a great ship with a great crew. We managed to achieve all of our experimental goals despite severald days of bad weather and many unexpected AUV problems. All of the problems were due to the age of the existing Odyssey vehicles. While the computers and software were new, the "bodies" were quite old. Our main vehicle Xanthos has seen well over 500 dives. Fortunately, with the help of my team, we overcame these problems and delivered the science data required.
We did have a few moments of real excitement. We were using a new experimental navigation algorithm. At one point the AUV drove strait into an instrument mounted to the bottom. The acoustic probe (long skinny bit on the nose of the AUV) was bent by the impact but it turned out to be easy to repair and no real damage was done. It makes for a good picture though! The other picture is just to prove that I don't always wear my MIT hard hat (only under the cranes!).


After the long weeks of GOATS 2000 it was nice to have some time back in the lab. We spent November, 2000 - April, 2001 planning our next experiments. We arranged a collaborative expedition to Greece to survey a shipwreck for some Greek Archaeologists. While I was coordinating the operation with our Director and Greek colleagues my team was completely refurbishing our AUV. We sacrificed Borealis for spare parts to support our lead vehicle Xanthos. The electircal systems and Xanthos were complelty checked out, the manuals were updated, and a new payload was installed. We added an underwater video camera, a light, and a control system so the AUV computer could control them both. We also added a Doppler Velocity Log (DVL) to improve the AUVs navigation.
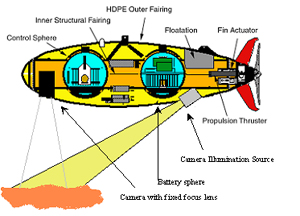
We shipped the new and improved Xanthos off to Greece for the cruise. We also teamed up with our friends from Bluefin Robotics. They brought one of their AUVs to provide sonar surveys. On the whole it was quite a successful trip. We surveyed the wreck and proved to the Greek Archaeologists that looter were not carrying off the valuable artifacts on the site. We hope to go back next year and do more exploration with AUVs in the area. The pictures here show a cross section of Xanthos and a picture as we launched the AUV.

I also work with the MIT Deep Sea Archeology research group. DeepArch was founded by Professor David Mindell of the MIT Science Technology and Society Department and Dr. Robert Ballard (who found the Titanic in 1985). The group is developing new techniques to study shipwrecks in very deep water. Traditionally wrecks have been studied by divers. Deep wrecks (which are often much better preserved) have been out of reach. We hope to apply the latest ocean technology and open the ocean depths to archaeology. The most exciting part of this work is that I get to combine my engineering skills with my interest in history and participate in a brand new field of research.
During July of 1999 I went to Sinop Turkey with the DeepArch operations team to investigate targets on the bottom of the Black Sea. These consist ot many interesting features identified using side-scan sonar during the summer of 1998. The next year we took two Remotely Operated Vehicles (ROVs) similar to those used to find the Titanic and tried to identify what these sites really are. We surveyed one large wreck relatively close to shore but it was not of ancient vintage. Using the ROVs and additional side-scan sonars we also found evidence to support the theory that there was a catastrophic flood of the Black Sea 7,500 years ago. You can read what National Geographic had to say about the expedition here.
The picture below shows Me, Brendan Foley (MIT STS Grad Student), Katy Croff (MIT OE Undergrad), and Sarah Webster (MIT Mech. E. Undergrad) sitting with the Minirover ROV which we used in Sinop. David Mindell is behind the camera.

Ocean Engineering Outreach and Communications
As Manager of Communications and Outreach for the MIT Department of Ocean Engineering I ran a variety of excting projects. A basic foundation of this effort was the development of a series of publication templates. These provided a family of graphic products which left blanks for text. This gave the Department a toolbox full of options when the next poster or brochure is needed. This effort also led to the creation of a new Department logo, new stationary and other products designed to refresh and reinforce the indentity of the OE Department.
The most exciting communications project I helped manage was the creation of a totally new exhibit in the Hart Nautical Gallery of the MIT Museum. The Hart Gallery is dedicated to the history and study of Naval Architecture and Ocean Engineering. I was given the privelege of serving as cocurator for the exhibit which we called Deep Frontiers, Ocean Engineering at MIT. The exhibit includes coverage of all the major research areas in the OE Department and highlights robotic systems like AUVs and RoboTuna.
In addition to this communications role I have been fortunate enough to be able to help develop novel educational programs with the Department. Our first major program was called Discover Ocean Engineering. This was a great success and attracted the attention of MIT and the Boston Press. The foundation begun in 1998 has served well and a second edition of Discover Ocean Engineering was offered in 1999. It will continue for the foreseeable future and has led to the creation of similar programs in other departments at MIT.
Another exciting educational project I coordinated was a collaboration with the Lawrenceville High School in New Jersey. This school runs a special educational program in the Bahamas. It is called the Cape Eleuthera Island School. They invited the MIT Department of Ocean Engineering to send a Guest Instructor to their program for a week. I went and taught hands-on ocean engineering. It was a great opportunity to reach the high school community and share with them the excitement of the ocean.
![]()
In August of 2000 I was lucky enough to consult for a television show produced by RDF Media and The Learning Channel. The show is called Junkyard Wars. The idea is to take a team of three people with good hands on skills and toss them in a junkyard to compete against another team. The teams are challenged to build something that they must use to beat the other team in competition. To assist the teams an "expert" in the area of that episode's challenge is brought in to work with the team. I was asked to help my team, Art Attack, build a powerboat. It was really a blast. The episode was shot in London because that is where the show originated. TLC has since set up a junkyard in California to shoot further seasons of the show with American casts. My team was great and included Duane, June, and her husband Ken. They build Kinetic Sculptures (big human powered machines that look wild) in Eureka, CA so their building skills were excellent. I won't tell you how we did (you'll have to ask or track down a tape or rerun) but we put on a great show. The picture below shows me with the boat we built out of junk Yes we did have to wear silly jumpsuits but hey, it was TV!
