
| Manned Operations | ||
|
Introducing EVE Hull Design Exostructure Power Propulsion Docking Ballast Sensors & Sampling Manipulators Life Support Navigation Communication Viewing Systems Control Systems ROV |
||
Manipulators
We shall have two manipulators (named A and B) attached to the submersible on the rear end. Manipulator A will handle delicate jobs, while B will be responsible for operations that require more physical involvement.
The manipulators should be able to perform the following tasks:
Manipulator A:
Picking up sensors from their slots, using them to make measurements and returning them to their slots again. Of course, picking up sensors and returning them is a difficult task. Therefore, instead of asking the person responsible for controlling the manipulators to do these tasks manually, they shall be automated. The MC (manipulator controller) will have a panel in front of him with 30 buttons corresponding to the 30 slots in the exostructure. In addition, there will be two buttons to ‘pick up’ or ‘return’ sensors. Therefore, to pick up sensor X, the MC will simply press the appropriate button followed by the ‘pick up’ button. Then, the manipulators automatically goes through a series of preprogrammed movements in order to pick up sensor X from its slot. This system saves the MC both effort and time.
Positioning the vacuum hose that will be attached to it.
Manipulator B:
Cutting. It will have a pair of scissors attached to it which will be used to cut things, e.g. a piece of a black smoker’s chimney.
Pick up things, move them around or put them in the science basket. This shall be accomplished by adding a claw-like structure to the manipulator. The science basket is an open container made of metal mesh that is attached on top of the sample box. It should be used to accommodate larger samples that cannot go through the vacuum hose. The manipulator picks up such samples (e.g. giant clams.) and puts them in the science basket. EVE moves at slow speeds, so samples are unlikely to be lost from this basket, despite that fact that it is open.
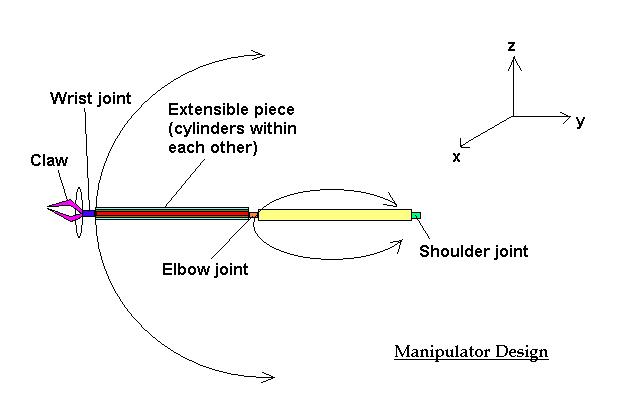
The manipulators will be very similar to the human arm and hand. Each manipulator will have the following joints:
1. Shoulder joint that should be able to rotate 180 degrees in the x-y plane.
2. Elbow joint that should be able to rotate 180 degrees in the y-z plane.
3. Wrist joint that should be able to rotate 360 degrees (full rotation) about its axis in the x-z plane.
The piece of the manipulator between the elbow and the wrist shall be made of cylindrical shafts that are inserted into each other (as in a car’s radio antenna.) In this way, the length of that piece can be varied during operation. The degrees of freedom of the manipulator are shown below.
The manipulators shall be controlled by advanced computer software that relies heavily on virtual reality systems. First, a 3D map of the region within which the manipulators can work is made using acoustic methods and cameras outside EVE. The MC should wear goggles to see that map. He/she will also have to wear data gloves that control the front ends of the manipulators. The position of the claw, scissor or whatever front end piece the MC wishes to use is controlled by the movement of the gloves. The software automatically calculates the fastest way in which to move the other parts of the manipulator in order to put the front end piece in that position. Then, the MC carries out the required operation as if (s)he were out in the water, e.g. grabbing an object or lifting it. This method is used in virtual surgery and in nuclear experiments, and it has proved to be successful. The reason behind implementing this system is to make it as easy and efficient as possible for the MC to do the job (s)he wants.